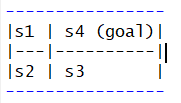
2x2 Grid MDP
(Source: Reinforcement Learning in R, by Nicolas Pröllochs, Stefan Feuerriegel)
Here we using the Reinforcement Learning Package to find the optimal solution for the grid problem. We have no information about the transition probabilities hence it is the model-free approach.
Reinforcement Learning Environment
The robot is in an environment, two-by-two grid and will take some actions and will move into a new state and or will receive a reward for moving to that state.
We're going to observe the agent interacting with the environment over and over and over again
- we're going to observe which of the possible actions the agent randomly takes
- what is the reward the agent receives
- the reward is a signal of how well the agent is performing
- our goal is that we want to improve behaviour
Given this limited feedback reward signal, we want to find the optimal policy for moving from state to state to maximise rewards.
Install & load R ReinforcementLearning package
#Install using devtools
install.packages("devtools")
# Download and install latest version from Github
devtools::install_github("nproellochs/ReinforcementLearning")
# Load the package
library(ReinforcementLearning)
library(dplyr)
Define environment function that mimics the environment
We pass the state-action pairs to the environment function which then returns the next state and the reward. For the grid mdp, we have an inbuilt function in the Reinforcement Learning package.
You can see the function models the environment:
- every possible action the agent can take
- what the new state will be
- and every possible reward the agent will receive for moving from state to state
#Note: to copy function code call without ()
env = gridworldEnvironment
print(env)
## function (state, action)
## {
## next_state <- state
## if (state == state("s1") && action == "down")
## next_state <- state("s2")
## if (state == state("s2") && action == "up")
## next_state <- state("s1")
## if (state == state("s2") && action == "right")
## next_state <- state("s3")
## if (state == state("s3") && action == "left")
## next_state <- state("s2")
## if (state == state("s3") && action == "up")
## next_state <- state("s4")
## if (next_state == state("s4") && state != state("s4")) {
## reward <- 10
## }
## else {
## reward <- -1
## }
## out <- list(NextState = next_state, Reward = reward)
## return(out)
## }
## <bytecode: 0x00000000109e4718>
## <environment: namespace:ReinforcementLearning>Create Sample Experience
To learn the agent we need a random sample of interactions of the agent with the environment for the given mdp - this is called the sample experience that is used for simulation during the actual learning process. For this, we pass the sample size, states, actions and environment objects to the inbuilt sampleExperience function which returns the data object comprising the random sequence of experienced state transition tuples (si, ai, ri+1, si+1) for the given sample size.
# See the sampleExperience function
?sampleExperience
"
Description
Function generates sample experience in the form of state transition tuples.
Usage
sampleExperience(N, env, states, actions, actionSelection = "random",
control = list(alpha = 0.1, gamma = 0.1, epsilon = 0.1), model = NULL,
...)
Arguments
N - Number of samples.
env - An environment function.
states - A character vector defining the enviroment states.
actions - A character vector defining the available actions.
actionSelection (optional) - Defines the action selection mode of the reinforcement learning agent. Default: random.
control (optional) - Control parameters defining the behavior of the agent. Default: alpha = 0.1; gamma = 0.1; epsilon = 0.1.
model (optional) Existing model of class rl. Default: NULL.
...
Additional parameters passed to function.
Value
A dataframe containing the experienced state transition tuples s,a,r,s_new. The individual columns are as follows:
State
The current state.
Action
The selected action for the current state.
Reward
The reward in the current state.
NextState
The next state.
"
Learning Phase Control Parameters
For this, we call the ReinforcementLearning function passing the sampleExperience object as input along with the control parameters like learning rate, discount factor and the exploration greediness value. It returns the rl object.
alpha - the learning rate, set between 0 and 1.
gamma - discount, discounts the value of future rewards and weigh less heavily
epsilon - the balance between exploration and exploitation
# RL control paramters
control = list(alpha = 0.1,
gamma = 0.5,
epsilon = 0.1)
control## $alpha
## [1] 0.1
##
## $gamma
## [1] 0.5
##
## $epsilon
## [1] 0.1Evaluate the policy
The policy function takes the rl object and returns the best possible action in each state. This is the optimal policy the agent has learned. If we print the rl object we get the state-action pairs, Q-value of each state-action pair.
For state s1 best action is down - it has the highest reward 0.76
For state s2 best action is right - it has the highest reward 3.58
For state s3 best action is up - it has the highest reward 9.13
For state s4 best action is left - it has the highest reward -1.87
And that is indicated by the best policy.
print(gridWold_RL_model)## State-Action function Q
## right up down left
## s1 -0.662419 -0.6590728 0.7644642 -0.6559966
## s2 3.573507 -0.6527449 0.7611561 0.7377884
## s3 3.587911 9.1349318 3.5744963 0.7749757
## s4 -1.872785 -1.8205106 -1.8582109 -1.8644346
##
## Policy
## s1 s2 s3 s4
## "down" "right" "up" "up"
##
## Reward (last iteration)
## [1] -285 Apply a policy to unseen data
To evaluate the out-of-sample performance of the agent for the existing policy we pass unseen data, states, and use the model to predict the best action for those states.
# Example data
data_unseen =
data.frame(State = c("s1", "s2", "s3"),
stringsAsFactors = FALSE)
#Pick optiomal action
data_unseen$OptimalAction =
predict(model, data_unseen$State)
data_unseen
'
State OptimalAction
1 s1 down
2 s2 right
3 s3 up
'
Evaluate updated RL model
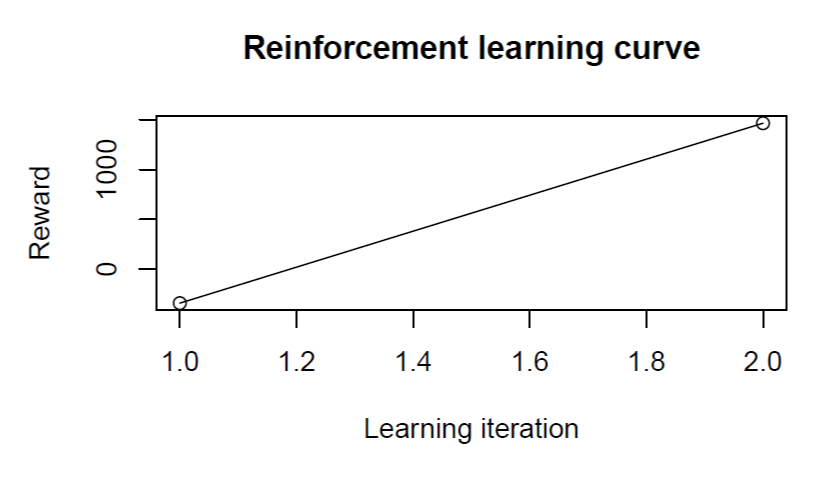
The following code snippet shows that the updated policy yields
significantly higher rewards as compared to the previous policy.
These changes can also be visualized in a learning curve via plot
(model_new).
# Print result print(model_new) ' State-Action function Q right up down left s1 -0.6386208 -0.6409566 0.7640001 -0.6324682 s2 3.5278760 -0.6384522 0.7624763 0.7710285 s3 3.5528350 9.0556251 3.5632348 0.7672169 s4 -1.9159520 -1.9443706 -1.9005900 -1.8888277 Policy s1 s2 s3 s4 "down" "right" "up" "left" Reward (last iteration) [1] 1277
Plot RL Curve
Plot the cumulative reward for the learning iterations.
# Plot reinforcement learning curve plot(model_new)
Conclusion